(출원번호: 10-2018-0084855), 2018-07-20
서지정보
| |
|---|
| IPC | - G05D 1/46(2024.01.01)- G08G 5/57(2025.01.01)- B64U 40/00(2023.01.01)- G05D 109/20(2024.01.01) |
| CPC | - G05D 1/46(2024.01)- G08G 5/57(2025.01)- B64U 40/00(2025.05)- G05D 2109/20(2024.01)- B64U 2201/20(2023.01) |
| 출원번호(일자) | 1020180084855 (2018.07.20) |
| 출원인 | 경북대학교 산학협력단 |
| 번역문제출일자 | |
| 등록번호(일자) | |
| 공개번호(일자) | 1020200009866 (2020.01.30)전문다운 |
| 공고번호(일자) | |
| 국제출원번호(일자) | |
| 국제공개번호(일자) | |
| 우선권정보 | |
| 법적상태 | 거절 |
| 심사진행상태 | 거절결정(재심사) |
| 심판사항 | |
| 구분 | 국내출원/신규 |
| 원출원번호(일자) | |
| 관련 출원번호 | |
| 심사청구여부(일자) | Y(2018.07.20) |
| 심사청구항수 | 3 |
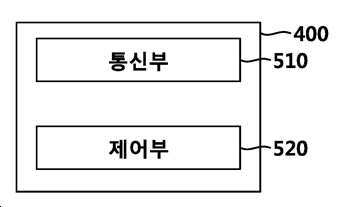
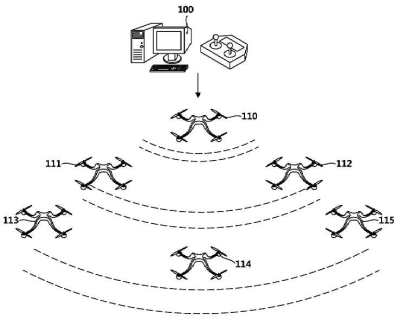
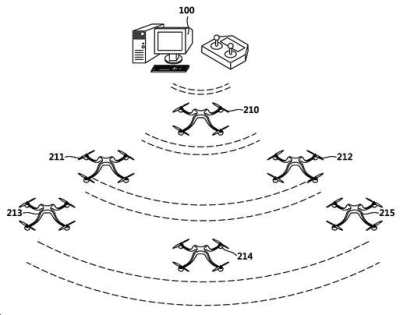
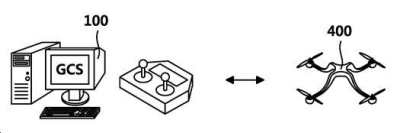
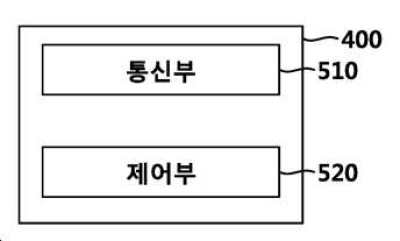
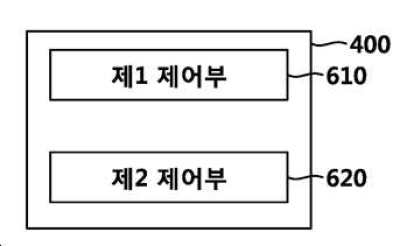
일 실시예에 따른 무인 비행체(Unmanned Aerial Vehicle: UAV)의 군집 비행을 제어하는 장치는 지상 제어 장치로부터 상기 무인 비행체의 군집 비행 명령을 수신하는 통신부, 상기 수신된 명령에 응답하여 상기 무인 비행체의 비행을 제어하는 제1 제어부, 상기 통신부와 상기 지상 제어 장치 간의 통신 연결 상태를 점검하는 점검부 및 상기 통신 연결 상태에 문제가 발생한 경우, 미리 정해진 명령에 따라 상기 무인 비행체의 비행을 제어하는 제2 제어부를 포함한다.
인명정보
출원인
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 경북대학교 산학협력단 (220040016844)- 사업자번호 | 대구광역시 북구... |
발명자
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 이우진 | 대구광역시 수성구... |
| 2 | 이성희 | 대구광역시 북구... |
| 3 | 김덕엽 | 대구광역시 수성구... |
대리인
| 번호 | 이름(번호) | 주소 |
|---|
| 1 | 김종선 (920030002489) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
| 2 | 이형석 (920030003344) | 서울특별시 강남구 역삼로*길 ** (역삼동) **층(역삼동, 광성빌딩)(케이엘피특허법률사무소) |
최종권리자
| 번호 | 이름(번호) | 주소 | |
|---|
| 데이터가 존재하지 않습니다. | | | |
등록 이후 발명자 정보
| 번호 | 이름(번호) | 주소 |
|---|
| 데이터가 존재하지 않습니다. | | |
등록 이후 대리인 정보
| 번호 | 이름(번호) | 주소 |
|---|
| 데이터가 존재하지 않습니다. | | |
지정국
인용/피인용
피인용
| 출원번호(일자) | 출원 연월일 | 발명의 명칭 | IPC |
|---|
| 데이터가 존재하지 않습니다. | | | |
청구항
| 번호 | 청구항 |
|---|
| 1 | 무인 비행체(Unmanned Aerial Vehicle: UAV)의 군집 비행을 제어하는 장치에 있어서, 지상 제어 장치로부터 상기 무인 비행체의 군집 비행 명령을 수신하는 통신부; 상기 수신된 명령에 응답하여 상기 무인 비행체의 비행을 제어하는 제1 제어부; 상기 통신부와 상기 지상 제어 장치 간의 통신 연결 상태를 점검하는 점검부; 및 상기 통신 연결 상태에 문제가 발생한 경우, 미리 정해진 명령에 따라 상기 무인 비행체의 비행을 제어하는 제2 제어부 를 포함하는 무인 비행체의 군집 비행을 제어하는 장치. |
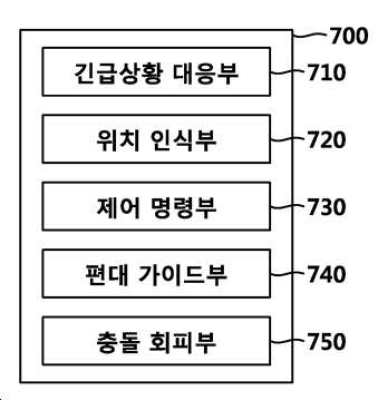
| 2 | 제1항에 있어서, 상기 제2 제어부는, 상기 군집 비행 중인 무인 비행체들에 복귀를 명령하는 긴급상황 대응부를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행을 제어하는 장치. |
| 3 | 제1항에 있어서, 상기 제2 제어부는, 상기 군집 비행 중인 무인 비행체들 간의 위치를 인식하는 위치 인식부; 및 상기 군집 비행 중인 무인 비행체들 간의 편대를 유지시키는 편대 가이드부를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행을 제어하는 장치. |
| 4 | 제3항에 있어서, 상기 편대 가이드부는, 상기 인식된 위치를 기초로 상기 군집 비행 중인 무인 비행체들 중 리더 무인 비행체를 정하고, 상기 리더 무인 비행체를 통해서 군집 비행을 제어하는 것을 특징으로 하는 무인 비행체의 군집 비행을 제어하는 장치. |
| 5 | 무인 비행체(Unmanned Aerial Vehicle: UAV)의 군집 비행을 제어하는 방법에 있어서, 지상 제어 장치로부터 상기 무인 비행체의 군집 비행 명령을 수신하는 단계; 상기 수신된 명령에 응답하여 상기 무인 비행체의 비행을 제어하는 단계; 상기 군집 비행 명령의 수신 상태를 점검하는 단계; 및 상기 수신 상태에 문제가 발생한 경우, 미리 정해진 명령에 따라 상기 무인 비행체의 비행을 제어하는 단계 를 포함하는 무인 비행체의 군집 비행을 제어하는 방법. |
| 6 | 제5항에 있어서, 상기 미리 정해진 명령에 따라 상기 무인 비행체의 비행을 제어하는 단계는, 상기 군집 비행 중인 무인 비행체들에 복귀를 명령하는 단계를 포함하는 무인 비행체의 군집 비행을 제어하는 방법. |
| 7 | 제5항에 있어서, 상기 무인 비행체의 군집 비행을 제어하는 방법��은, 상기 무인 비행체의 프로세서에 펌웨어 형태로 설치되는 것을 특징으로 하는 무인 비행체의 군집 비행을 제어하는 방법. |
패밀리정보
통합심사정보
| 순번 | 패밀리번호 | 출원일자 | 국가코드 | 국가명 | 종류 |
|---|
| 데이터가 존재하지 않습니다. | | | | | |
DOCDB 패밀리정보
| 순번 | 패밀리번호 | 출원일자 | 국가코드 | 국가명 | 종류 |
|---|
| 데이터가 존재하지 않습니다. | | | | | |
국가연구개발사업
| 순번 | 연구부처 | 주관기관 | 연구사업 | 연구과제 |
|---|
| 1 | 교육부 | 경북대학교 | 개인기초연구(교육부)(R&D) | 분산 임베디드 소프트�웨어의 실행로그 기반 테스팅 프레임워크 |
| 2 | 과학기술정보통신부 | 경북대학교 산학협력단 | SW전문인력역량강화 | SW중심대학(경북대) |
대표도면
도면1
도면2
도면3
도면4
도면5
도면6
도면7